H40 EMG-Controlled Robotic Arm
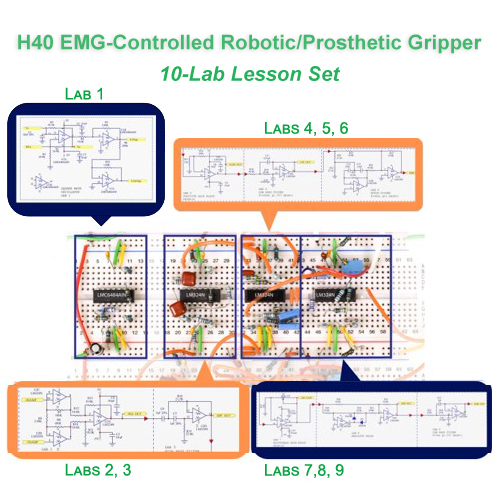
The H40 lesson set guides students through breadboard circuit design to ultimately control a simplified robotic “arm” using their own EMG signals. The lesson set contains 10 individual labs, designed with the next generation of students in mind. A “pre-lab” provides background information on breadboard basics to ensure an easy start for students from a variety of disciplines—life science, engineering, physics, etc.
Labs are structured with active learning principles that guide students through designing the robotic arm from the ground up. Each lab has specific learning objectives and an accompanying Data Report with analysis questions and activities that check understanding; tolerances for reported measurements are included for easy verification. Students and instructors may also refer back to the Appendix, which includes additional information on the equations used, user software interface, graph template settings, and a glossary that defines the scientific terminology used throughout the lesson set.
This Robotic Arm Lab Set is a comprehensive introduction to robotics and signal processing that bridges biology and engineering. Students read and translate the schematic onto the breadboard and become familiar with circuit design and practical issues with construction and testing.
Experimental Objectives
- To address practical issues associated with signal processing module (circuit) construction and testing.
- To understand the relationship of any single processing module to the EMG-Powered Robotic Arm System.
- To recognize the similarities in circuitry for biopotential driven devices, such as the EMG-Powered Robotic Arm and the ECG Signal Processor from BSL PRO Lesson Set H25-H26.
- To expand on biological principles and engineering standards that are commonly applied to biomedical device applications.
Tasks Performed by the Student
- Perform calculations for: gain, CMR/CMRR, frequency response bandwidths, and cutoffs
- Design performance tests for the EMG-Controlled Robotic Prosthetic Arm
- Utilize industry-standard hardware: Arduino UNO (BSL-DEV-S)
- Labs 1-9: Construct circuit modules
- Lab 10: Overall system test
Videos
H40 EMG-Controlled Robotic Arm Lab
H40 EMG-Controlled Robotic Arm Lab 1
H40 EMG-Controlled Robotic Arm Lab 2
H40 EMG-Controlled Robotic Arm Lab 3
H40 EMG-Controlled Robotic Arm Lab 4
H40 EMG-Controlled Robotic Arm Lab 5
H40 EMG-Controlled Robotic Arm Lab 6
H40 EMG-Controlled Robotic Arm Lab 7
H40 EMG-Controlled Robotic Arm Lab 8
H40 EMG-Controlled Robotic Arm Lab 9
Lesson Hardware
The BSLBME-ROBOT-HW kit includes all required hardware for building the EMG Robotic Arm using the BSL PRO H40 Lesson Set with an exisiting MP36/35 running BSL 4.1 or higher.
BSLBME-ROBOT-TA includes all of the components in BSLBME-ROBOT-HW except SS39LB Signal & Power Cable and SS60LB Input Cable. It can be used to add additional workstations...students build their own breadboard and then use shared SS39LB and SS60LB cables to power and test their build.
Digital Voltmeter (DVM) Power busses are measured using a lab-standard digital voltmeter (DVM) at the start of each lab. If your lab does not have DVMs available, you may skip this step.
| Item | Name | Cart |
|---|---|---|
| BSLBME-ROBOT-HW | Robotic Arm Lab Set | Add to Cart |
| BSLBME-ROBOT-TA | Robotic Arm Lab Accessories | Add to Cart |
Stay Connected